欢迎访问北科(深圳)机电科技有限公司网站!
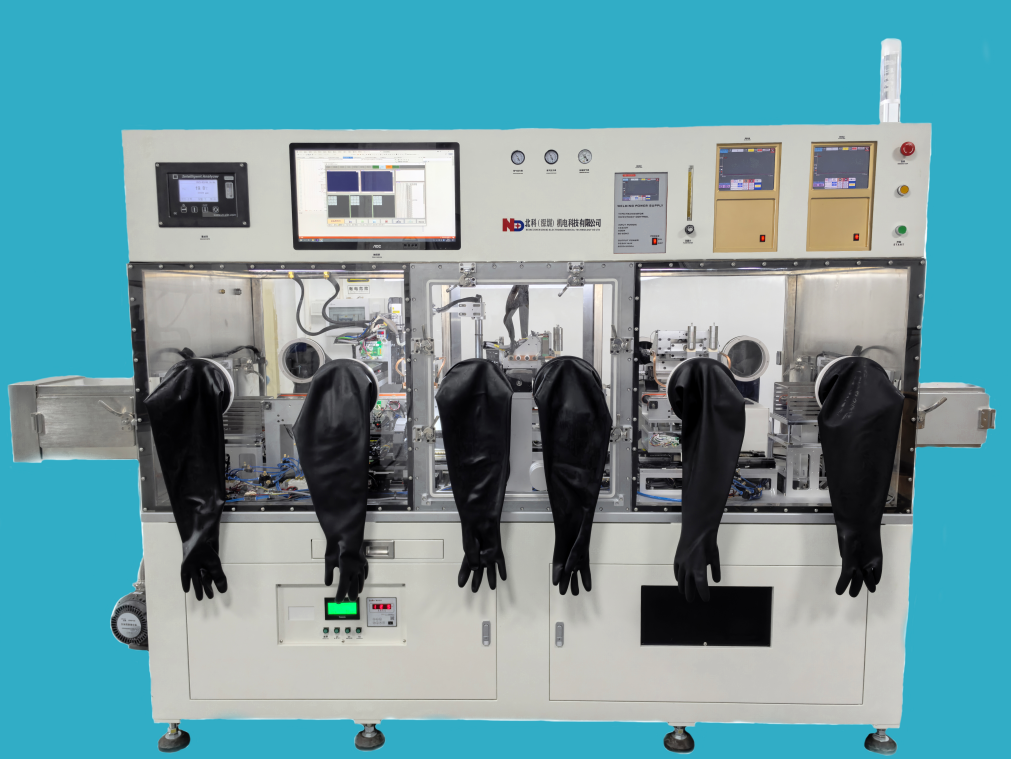
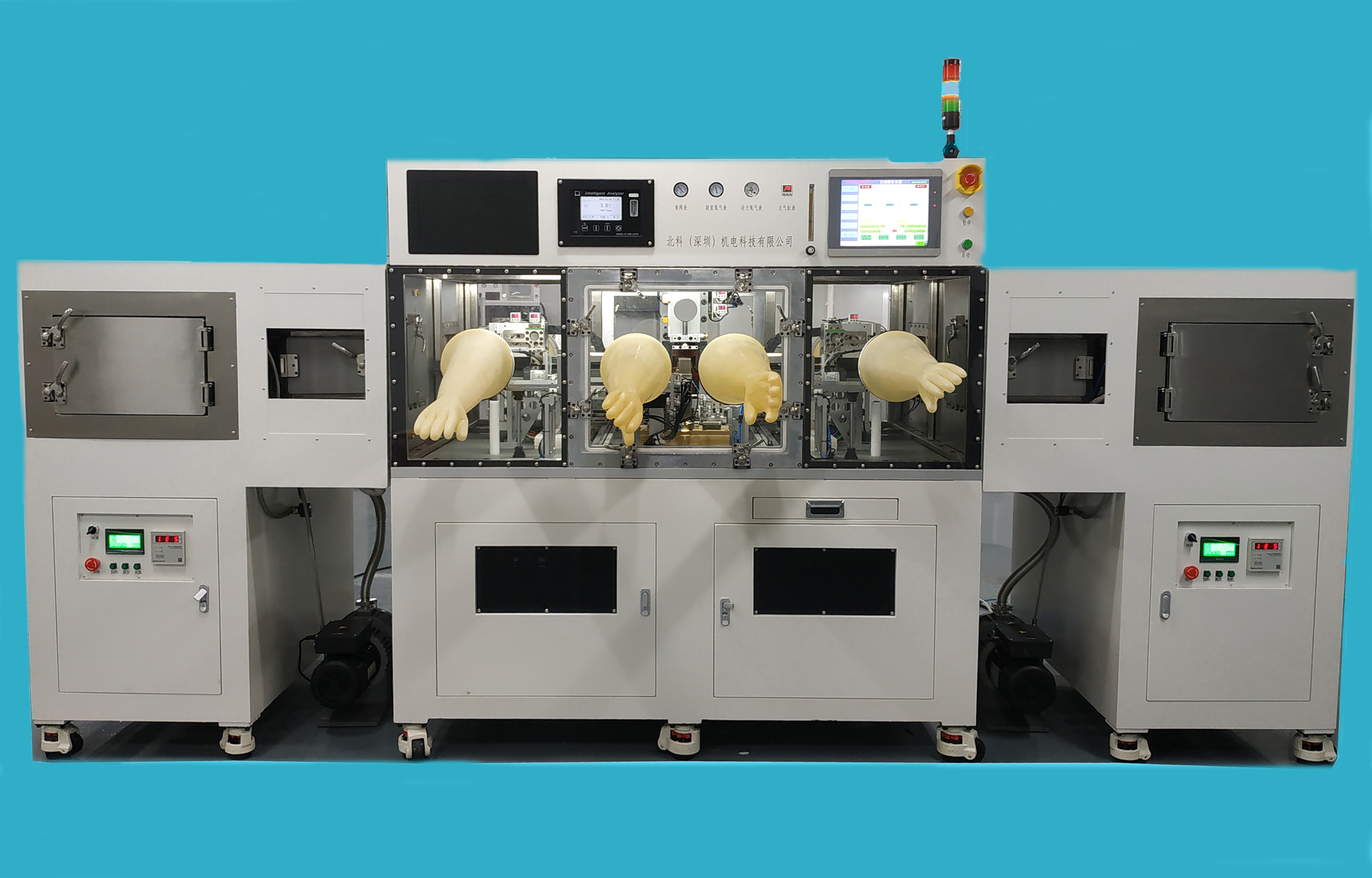
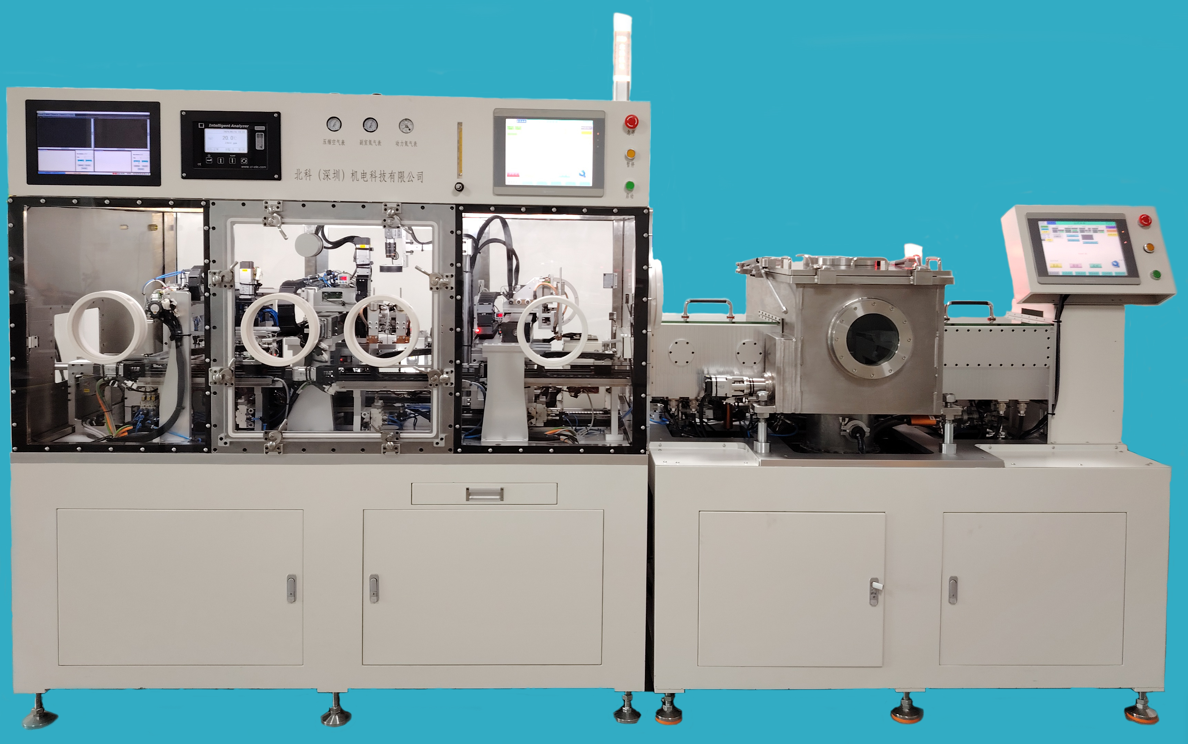
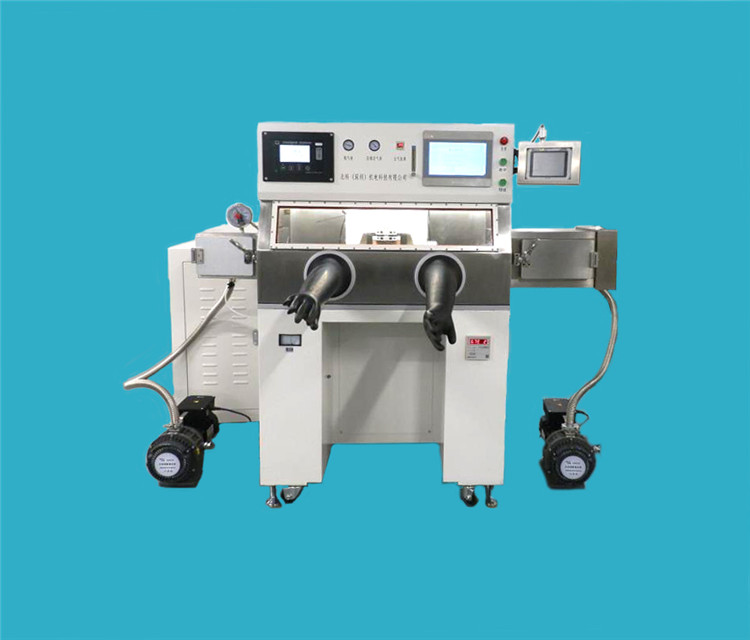
光电器件TO46、TO56、TO39、TO38等高精度封焊设备
订购咨询热线:0755-2899763615899867682 13321105262
FIS-5030全自动视觉..
AWS-2889自动储能封..
ATS-2889HV自动视觉..
FIS-2010VB全自动视..
AIS-2030PS自动视觉..
MIS-1020手动平行缝..
MWS-2889手动储能封..
MWS-3515HVF手动高真..
MWS-1536手动重型储..
TOSA手动金属件封焊机
扫一扫加好友
微信公众号
地址:深圳市龙岗区园山街道大康社区东海科技工业园10号三楼
联系人:李华春
邮箱:15899867682@139.com
首页
服务分类
热线电话
在线咨询